v1.5.0 신규 기능 및 개선 사항
안녕하세요! 지난 3월 10일 배포된 1.4.1 버전 이후 적용된 주요 업데이트 내역을 안내해 드립니다.
이번 업데이트에서는 RTC5 및 RTC6 컨트롤러의 확장성을 극대화하는 스테퍼 모터 제어 및 시리얼 통신 지원 기능이 새롭게 추가되었습니다. 또한, 확장 Marking on the Fly(MoF) 기능을 제공하고 주요 UI의 리팩토링을 통해 개발 편의성과 시스템 안정성을 한층 높였습니다.
자세한 변경 사항은 아래 카테고리별 내용을 확인해 주시기 바랍니다.
🚀 1. 신규 기능 추가 (New Features)
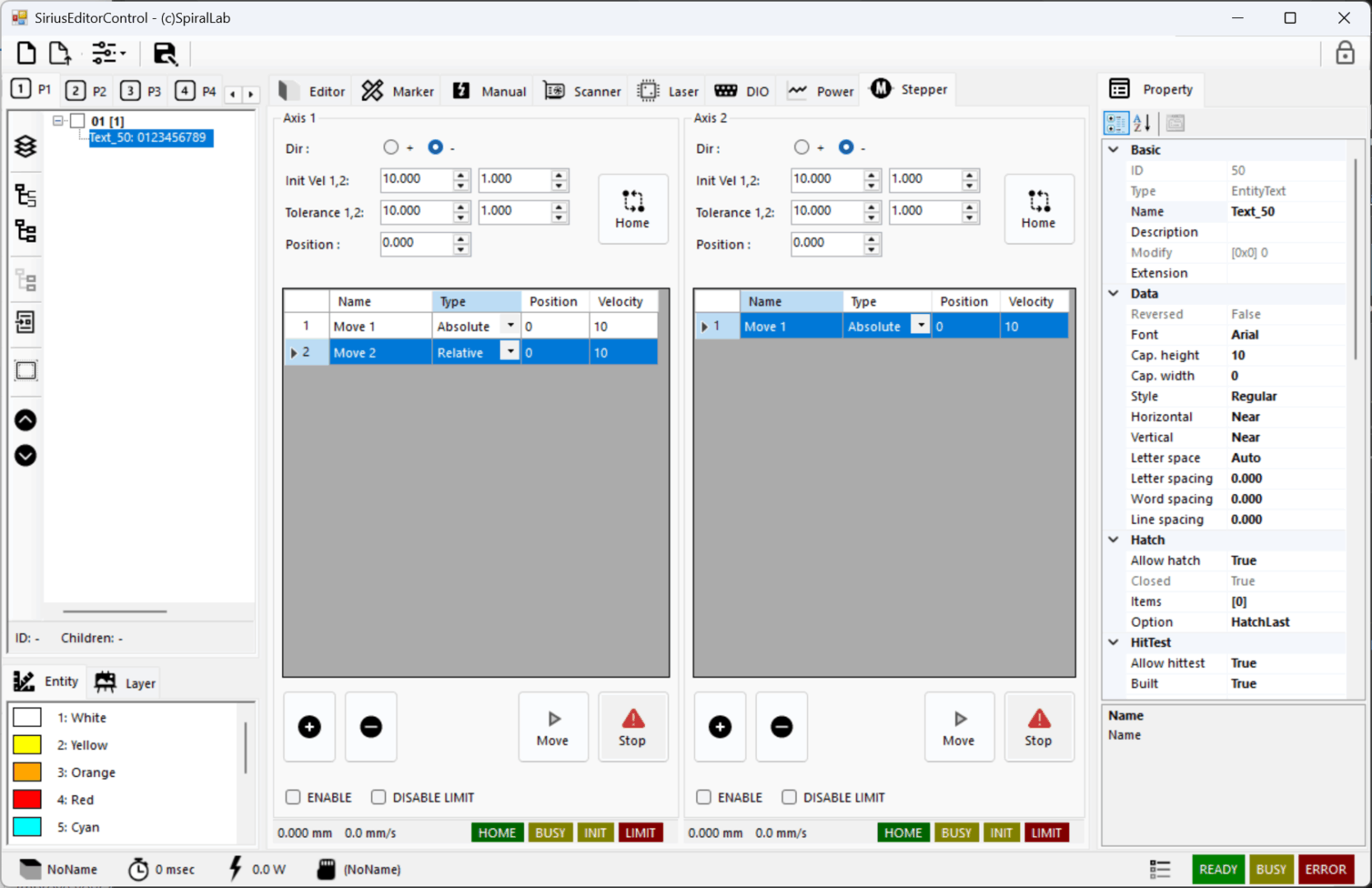
⚙️ 스테퍼 모터 제어 지원 (Stepper Motor Control)
RTC5, RTC6 제어기의 스테퍼 단자를 직접 활용하여 외부 스텝 모터를 제어할 수 있는 기능이 추가되었습니다.
- 외부 모터 제어: RTC5, 6 스테퍼 단자 기반 제어 지원
- 신규 인터페이스 및 UI:
IRtcStepper인터페이스 및StepperControl사용자 컨트롤 UI 추가 - 이동 제어: 스텝 모터의 절대 좌표(Absolute) 및 상대 좌표(Relative) 이동 완벽 지원
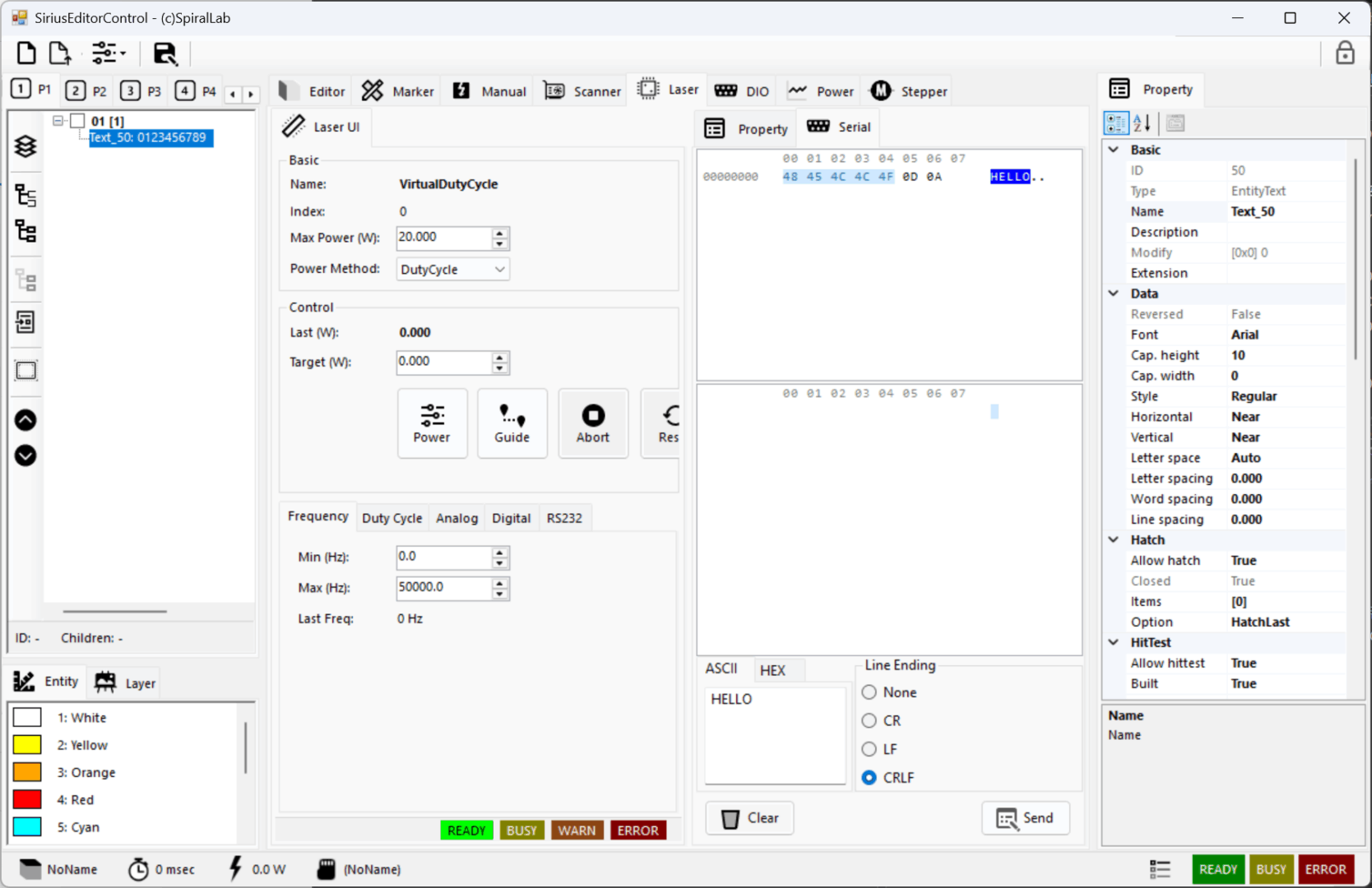
🔌 시리얼 통신 지원 (Serial Communication)
별도의 통신 모듈 없이 제어기 단자를 통한 다이렉트 시리얼 통신 환경을 구축했습니다.
- RS232 통신: RTC5, 6의 RS232 단자를 통한 통신 기능 추가
- 신규 인터페이스 및 UI:
IRtcSerialComm인터페이스 및SerialCommControl사용자 컨트롤 UI 추가 - 데이터 모니터링: 레이저(Laser) 탭에서 송수신 데이터(바이너리 형식) 실시간 모니터링 기능 제공
- 이벤트 추가: 데이터 수신 처리를 위한
OnSerialReceived이벤트 추가
📁 .sirius3 파일 가져오기 (Import)
작업 효율성을 높이기 위해 외부 .sirius3 파일을 쉽게 병합할 수 있는 기능이 도입되었습니다.
- 외부에 저장된
.sirius3파일을 가져와 현재 작업 중인 문서의 신규 레이어(Layer)로 추가할 수 있습니다.
🛠️ 2. 기능 개선 및 리팩토링 (Improvements)
✈️ Marking on the Fly (MoF) Extension 개선
이동 중 마킹(Marking on the fly) 작업 시 더 복잡한 제어가 가능하도록 RTC6 전용 확장 기능인 Fly Extension 을 지원합니다.
- 인터페이스 개편:
IRtcMoFExtension인터페이스 구조 리팩토링 - 다축 제어: 3축 조합(X, Y, Z 또는 회전축) 마킹 지원
- 통신 지원: McBSP 통신 지원 추가
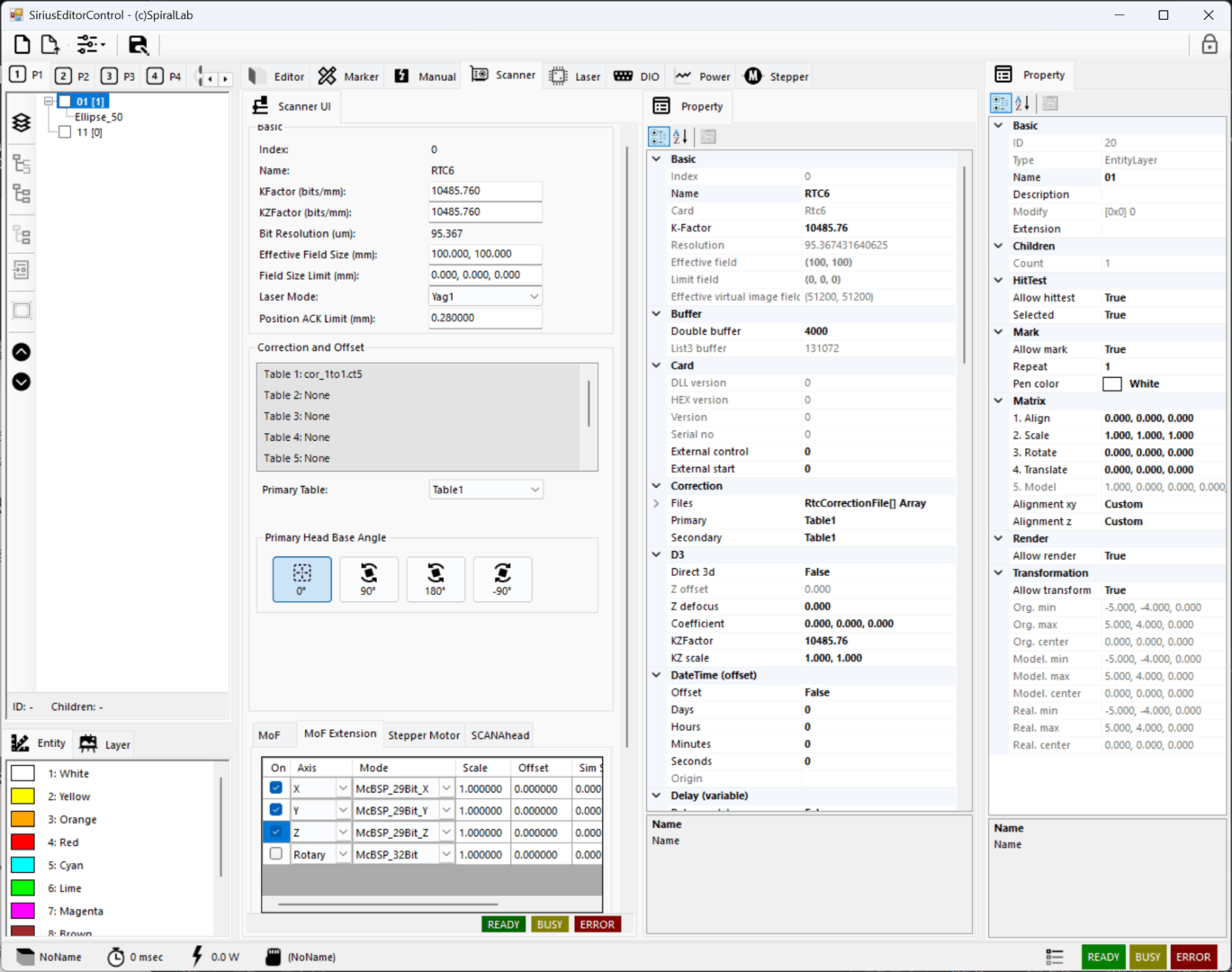
🖥️ 사용자 컨트롤 UI 리팩토링
코드의 유지 보수성을 높이고 사용자 경험을 개선하기 위해 핵심 UI 컨트롤들의 내부 구조를 리팩토링했습니다. 아래 이미지와 같이 좌우 화면으로 분리하여 가독성을 높혔습니다.
OffsetControlMarkerControlScannerControlLaserControl
🐛 3. 버그 수정 및 안정화 (Bug Fixes)
🧮 행렬 스택 (Matrix Stack) 구조 통합
기존 MatrixStack 의 행렬 처리 방식을 단순화 했습니다.
- 기존
MatrixStack클래스 내의BaseMatrix속성 삭제 IRtc.CtlMatrix및ListMatrix사용으로 행렬 관리 통합 지원
⚡ 파워미터 (Power Meter) 오류 수정
특정 파워미터 하드웨어 연결 시 발생하던 통신 및 데이터 파싱 문제를 해결했습니다.
- 수정 완료:
CoherentPowerMax,GentecEO장치에서 파워 값을 정상적으로 읽어오지 못하던 오류 수정
💡 개발자 참고 사항: 업데이트된 최신 소스코드는 GitHub 리포지토리에서
pull하여 확인하실 수 있으며, 신규 인터페이스(IRtcStepper,IRtcSerialComm) 적용 시 제공되는 샘플 코드를 참고해 주시기 바랍니다.